今回は警備業界に焦点をあてます。
警備業界と聞くと、多くの人は、人による警備や機械警備をイメージするかもしれません。
また、技術的には家庭の玄関などに設置された監視カメラなどが思い浮かぶかもしれません。
しかし、この業界は、日常的な防犯だけでなく、交通誘導や非常時の災害対応など多様なサービスが展開されています。
これを特許情報からみていきます。
特許情報は企業の開発情報だと言えます。
実際にどのような開発がおこなわれたのか特許情報に記載されています。
今回は、警備大手2社の特許情報からどのような開発がおこなれてきたのか、また、開発にどのような専門性が求められるのか読み解きました。
結論(概要)は以下の通りです。
・情報系分野(情報科学、認知科学、データサイエンス、ソフトウェア工学、情報工学、通信工学、データサイエンス、コンピュータサイエンスなど)
・数学系分野(応用数学、数理科学、統計学など)
・機械系分野(機械工学、航空宇宙工学など)
・電気系分野(電子工学、制御工学など)
・物理系分野(物理学など)
1 業界サーチの概要
特許情報は企業の開発情報だと言えます。
業界サーチは、業界における主要企業の特許情報から、その業界の企業がどのような開発をおこなってきたのか、客観的な情報を導き出そうとするものです。
特許分類(後述)からは、その特許に関わる開発の主な技術分野がわかります。
すなわち、その企業の開発職においてどのような専門性が求められるのか特許情報から推測できます。
2 警備業界
2.1 警備業界とは
ここでは、人手や機械により個人の安全や施設などを守るサービスを提供する業界を意図します。
事件・事故の防止、災害時の対応など、そのサービスの内容については区別していません。
2.2 サーチ対象
以下の2社を対象にしました。
(2)綜合警備保障株式会社(ALSOK)
2.3 使用プラットフォーム
特許情報プラットフォーム(J-PlatPat)
3 サーチ結果
3.1 結果概要
開発イメージは下表のとおりです。
|
モノの開発 |
サービスの開発 |
|
|
個人向け |
|
|
|
法人向け |
・顔認証の失敗によって正規の利用者が誤って侵入者と判定されることを防ぐ監視システム |
|
3.2 出願件数の推移
下図は警備2社の特許出願件数の推移です。
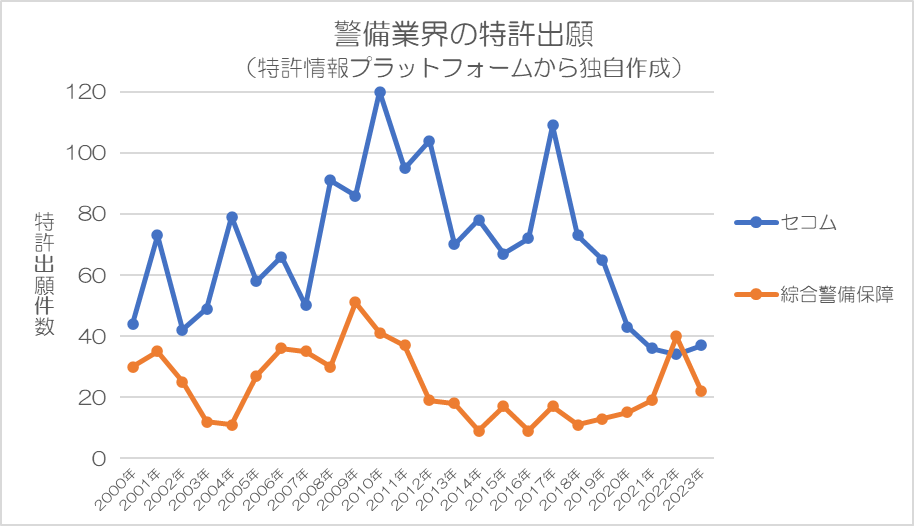
2社とも毎年数10件の出願をおこなっています。
そのような出願につながる開発がおこなわれていることが推測されます。
3.3 開発の活発度
特許出願件数≒開発の活発度、だと考えるなら、
セコム>綜合警備保障
だと言えます。
ただ、上図が示す通り、その差は必ずしも大きいとは言えず、出願件数が逆転している年もあります。
3.4 主な開発分野
各社ごとに特許出願件数が多かった技術分野を以下に示します。
各社の出願上位3つの技術分野を抽出して並べています(特許出願されていても、その企業の出願件数上位に入っていない技術分野は除外されています)。
各記号は発明の技術分類をあらわします。
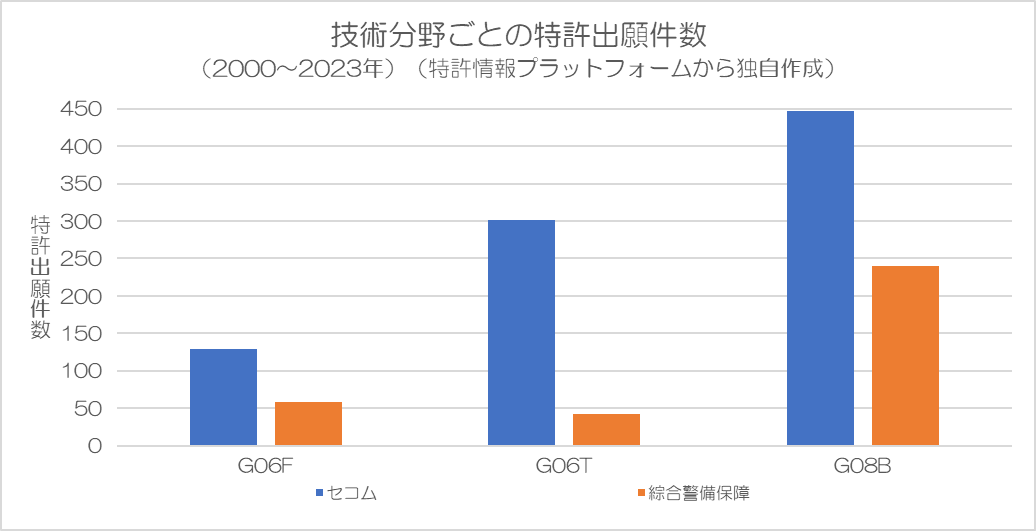
分類参照:FIセクション/広域ファセット選択(特許情報プラットフォーム)
プログラム制御のための装置などがこれに該当します。
2社ともこの分野から多く出願しています。
汎用イメージデータ処理などがこれに該当します。
2社ともこの分野から多く出願しています。
可視信号装置などがこれに該当します。
2社ともこの分野から多く出願しています。
3.5 警備2社の近年の開発トレンドと求められる専門の例
特許情報の出願年数が新しいほど、その企業の開発実態を反映していると言えます。
ここ10年のトレンドは以下のとおりです。
発明の主要な技術分野(筆頭FI)の出願年ごとの出願件数です。
出願件数が少ない技術分野は除外しています。
発明の説明は、必ずしも特許請求の範囲を完全に表現したものではありません。
関連する専門分野の例はあくまでイメージです。また、専門の概念レベルを必ずしも同一レベルで表示してはいません。
特許は難解ですが、GeminiやChatGPTなどのテキスト生成AIを活用すると簡単に解読できます。以下の記事を参考にしてください。
(1)セコム|開発トレンドと専門性
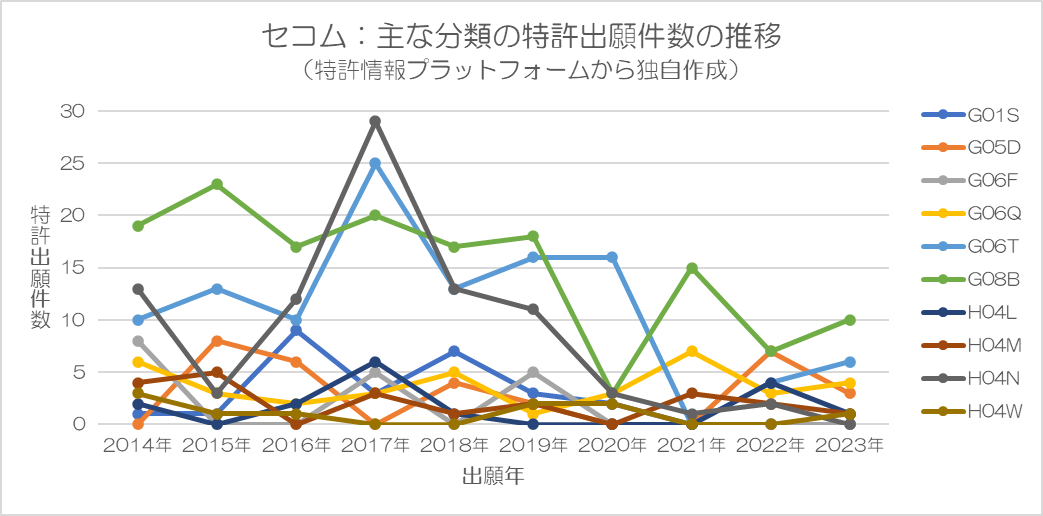
上図期間中、G08Bが最も多いです。次いでG06T、H04N、G06Q、G05Dが多いです。
具体例として顔認証の失敗によって正規の利用者が誤って侵入者と判定されることを防ぐ監視システムが挙げられます。
従来の監視システムでは、顔認証の精度が環境要因で低下し、正規の利用者でも誤検知される問題がありました。
これに対し、監視エリアへの侵入を検知するセンサー、登録者の顔画像を予め記憶する記憶部、利用者の顔を撮影する撮像部、利用者を認証する認証手段を備えた監視システムであり、侵入検知信号が取得されてから所定の保留時間内に認証が成功しなかった場合に侵入があったと判定し、利用者が登録者である可能性の高さを示す第一指標または撮影環境の良否を示す第二指標を推定する手段が、利用者が登録者である可能性が高いと判断した場合あるいは撮影環境が不良であると判断した場合に、侵入判定を抑制する処理(保留時間の延長や警報の通報を待機)をおこなうことで、正規の利用者が認証に失敗しても誤って侵入者と判定される事態を防ぐことを可能にする監視システムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7713420/15/ja
関連する専門分野の例:情報科学(複雑な環境要因(例:照明、角度、顔の隠れ)に対応するための顔の識別を行う深層学習モデルの設計、誤検知を抑制するための顔認証の類似度スコアと環境指標(照度、顔の向きなど)の分析および侵入判定ロジックを最適化するアルゴリズムの構築)、認知科学(ユーザーが認証に失敗する際の行動パターン(例:カメラを避ける、慌てて操作する)の観察・分析、システムが認証の意思をより正確に推定するための手法の探索、警報の保留時間や警告メッセージの表示タイミングなどシステムの反応がユーザーの認知や行動にどのような影響を与えるかの評価)
従来の監視システムは複数の警備モードを備えていても、ユーザーがその利用状況を簡単に確認・把握することが困難でした。
これに対して、警戒モードと解除モードを含む複数の警備モードを設定する手段を備えた監視システムであり、ユーザーが警備モードを変更した履歴に基づき所定期間における各モードの利用時間を算出し、算出された各モードの利用時間の合計に応じた情報を表示し、表示情報として警戒モードの合計利用時間が所定期間全体に占める割合を視覚的に理解しやすいグラフ形式で提供するにより、ユーザーはサービスが適切に利用されているかを直感的に確認できる監視システムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7693368/15/ja
関連する専門分野の例:データサイエンス(警備モードの設定履歴データ、センサーの検知情報、時間帯などの複数のデータの統合およびユーザーの行動(在宅、外出、就寝など)を自動で推定する機械学習モデルの構築、ユーザーが警備モードを適切に設定し忘れている可能性のある改善候補の時間帯を特定するアルゴリズムの設計)、ソフトウェア工学(利用時間の合計や割合を直感的に表示するグラフ(棒グラフ、円グラフなど)のユーザーインターフェース設計、多数のユーザーの警備モード設定履歴を効率的に処理してリアルタイムに利用時間を算出するシステムの設計)
従来の警備システムは停電から復旧する際に、停電前の警備状態を引き継ぐだけで状況の変化に対応できませんでした。
これに対して、停電を検知する機能と復電を検知する機能および停電期間の長さを取得する手段を備えた警備装置であり、復電を検知すると、まず停電期間が所定時間より短いか否かを判定し、停電期間が短い場合は停電前の警備モードをそのまま復帰後の状態として設定し、一方、停電期間が所定時間以上と長い場合は利用者の状況が変化した可能性を考慮し、予め定めた所定の警備モードを自動的に設定し、さらに、非警戒モードが設定された後でも確認期間内に人の存在が検知されなければ、自動で警戒モードに再設定することにより、復電後の状況に合わせた適切な警備体制を確立し、誤報や監視漏れを防ぐことができる警備装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7370794/15/ja
関連する専門分野の例:情報工学(停電検知から復電検知までの時間を正確に計測するタイマー機能や停電日時・復電日時を記録するデータ管理機能の実装、所定時間長を動的に変更するアルゴリズム(例: 平日昼間と休日夜間とで基準値を変更する)の設計、復電後に非警戒モードから警戒モードへ自動再設定する際の確認期間の長さを停電前のモードや復電日時によって調整する制御ロジックの実装)、認知科学(停電が長時間にわたる場合や特定の時間帯に復電した場合の利用者の在宅・外出の可能性の調査、より適切な初期警備モードを設定するためのルールベースの構築、復電時に警備モードが自動変更されることをユーザーにどのように通知すれば最も効果的でストレスが少ないかの評価)
具体例として複数のセンサーデータから対象物の特徴を抽出して分析を可能にするデータ処理装置が挙げられます。
単一のセンサーデータだけでは高精度な分析が難しく、複数のセンサーデータを単純に統合すると各データの関係性が考慮されず誤差が生じる問題がありました。
これに対して、複数の計測点から得られたデータ(例:複数のカメラ映像)を基にそれぞれからデータ特徴量を抽出する特徴量抽出部を備え、特徴量統合部が各計測点と対象物の実空間上の位置関係を考慮し、異なる特徴量間の対応関係を決定、例えば各計測点から対象物への相対的な角度差に基づいて要素の「ずれ」として表現され、この「ずれ」を補正して対応する要素同士を統合することで各データの特徴量を統一的に扱える単一の特徴量ベクトルを生成し、統合された特徴量ベクトルにより対象物の形状や姿勢を推定できるデータ処理装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7594889/15/ja
関連する専門分野の例:応用数学(特徴量ベクトルを円環状や球状の空間に配置して計測点の位置関係に基づいて回転やシフトをおこなう特徴量統合の操作の定式化、複数の計測点から得られるデータの不確実性(ノイズ)が最終的な推定結果にどのように伝播するかの解析、複数視点のデータから3次元形状を復元する際に発生する視差や遮蔽の問題を解決するための数理モデルの検討)、電子工学(複数のカメラから得られる大量の画像を高速かつ低消費電力で処理するための画像処理回路の設計、センサー間の時刻同期をミリ秒単位で実現するための同期回路やプロトコルの設計、センサーノイズを低減するためのアナログ回路設計)
従来の偏光情報を用いた影検出は床面が平滑な場合にしか適用できず、アスファルトのような粗い床面では影の判別ができないという問題がありました。
これに対して、まず偏光カメラで撮影した入力画像とあらかじめ記憶しておいた背景画像を比較して変化した領域を抽出し、次に偏光情報から光源位置を推定する手段を用いて背景画像における床面の光源位置と変化領域の各画素の光源位置をそれぞれ推定し、推定した光源位置が床面と異なる画素を影領域として判定し、物体による領域と影の領域を分離することにより、粗い床面であっても影を正確に検出できる画像処理装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7399000/15/ja
関連する専門分野の例:物理学(偏光板や光センサーの物理的特性の解析、異なる表面(平滑面、粗面)での光の反射・散乱が偏光情報にどう影響するかの評価、現実の環境における偏光画像の生成モデルの構築、物体からの反射光が偏光する原理の分析および当該モデルからアルゴリズム設計、影領域内の偏光状態が物体や周囲の環境光によってどう変化するかの物理的評価)、情報工学(偏光画像と通常の輝度画像を組み合わせたマルチモーダルなデータセットの構築、影と物体の境界をより正確に抽出するモデルの構築)
従来の複数カメラによる認識技術は混雑によって個別認識結果の信頼性が低下する問題を効果的に防止できませんでした。
これに対して、共通視野を持つ複数の撮影手段で撮影した画像を使用する物体認識装置であり、まず撮影画像ごとに写っている物体の混雑度を推定し、次に各撮影画像から物体の位置を認識して個別認識結果を生成し、物体を認識した位置の混雑度に応じて各撮影手段の個別認識結果に重みを付け(重み付けは混雑度が高いほど小さくなるように決定)、最後に重み付けを用いて各個別認識結果を統合し、物体の最終的な位置を求めることにより、群衆などで信頼性が低下した認識結果の影響を低減でき、物体認識の精度を向上させることができる物体認識装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7488674/15/ja
関連する専門分野の例:情報工学(画像から人物の混雑度を推定する深層学習モデルの設計、各カメラの認識結果に重み付けをおこなってそれを統合して最終的な人物の位置を決定するアルゴリズムの設計)、機械工学(複数のカメラを最適な位置と角度に設置するための機構設計、振動や環境変化に強い筐体の設計、カメラの位置、向き、焦点距離などの外部・内部パラメータの測定・調整、各カメラの画像座標系と現実世界の3次元座標系を正確に対応させるキャリブレーション手法の検討)
具体例として監視カメラの最適な設置位置を評価・計画する設置支援装置が挙げられます。
従来の設置計画技術は移動する障害物を考慮できないため、現実の状況では頻繁に視界が遮蔽される問題がありました。
これに対して、監視空間の構造物情報と移動する遮蔽物が存在する確率を分布として含む確率的遮蔽物情報を記憶部に保持し、評価値算出部がカメラの候補設置場所と監視すべき場所を結ぶ線分上で移動遮蔽物の存在確率からカメラの視界が遮蔽されずに監視できる確率を算出し、この確率に応じて評価値を求めて複数の監視点がある場合はそれぞれの確率を基に統合的な評価値も算出することにより、時間帯や人の流れといった現実の状況を反映した評価が可能となり、より適切なカメラ設置位置を探索できる設置支援装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7303149/15/ja
関連する専門分野の例:情報工学(評価地点と監視点を結ぶ線分上を仮想的に探索して複数の移動遮蔽物による視界の遮蔽確率を計算するアルゴリズムの設計、算出された評価値を監視空間の3次元モデル上に色や濃淡で可視化するための画像生成プログラムの設計)、数理科学(過去の移動データの分析、監視空間内における人や車両の存在確率分布を正確にモデル化するための統計的手法の確立、カメラの視界が複数の移動遮蔽物によって遮られる確率をそれぞれの遮蔽物の存在確率と結合確率を用いて計算するための数学的モデルの構築)
従来のレイトレーシング(光の経路を逆にたどって画像を生成する手法)によるシミュレーションは精度を高めると計算コストが膨大になるという問題がありました。
これに対して、カメラ情報と監視空間内の構造物情報を記憶部に保持し、まずカメラから所定の距離に背景面を設定し、構造物の表面と背景面のうちカメラから見える可視領域を算出しま、次に可視領域を多角形に分割してカメラ位置を頂点、多角形を底面とする角錐が占める空間をカメラの可視空間として算出(複雑な可視空間を角錐の集合として表現)することで、従来のボクセルベースのシミュレーションよりも少ない計算量で高い精度で可視空間を求めることができる撮影シミュレーション装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7311327/15/ja
関連する専門分野の例:情報工学(複雑な形状の可視領域をコンピュータが扱いやすい凸多角形(例:三角形)に自動的に分割するプログラムの作成、多数のカメラと構造物で構成される空間モデルにおいて可視空間を計算するための処理速度を向上させるアルゴリズムの設計)、機械工学(監視カメラと構造物の3次元モデルを生成・管理する手法の探索、複数の物体(角錐や構造物など)が空間内でどのように重なり合うかを判定するための衝突判定アルゴリズムの設計、シミュレーションによって得られた可視空間や重複空間の体積を計算する手法の探索)
具体例として行動目的を持つ人々の集団行動を個々の経験や知識の偏りを反映させて予測するシミュレータが挙げられます。
従来のシミュレータは群集行動を個々の経験差を考慮せず単純なルールで予測するため、現実世界に即した精度の高い予測が困難でした。
これに対して、行動目的を持つ複数のエージェントが複数の目的地から最適なものを選ぶ行動を模擬するシミュレータであり、各エージェントが目的地に到達するまでの所要時間に関する統計情報を個別に記憶し、エージェントは統計情報と行動の達成期限までの残り時間に基づき、各目的地で行動目的を達成できる確率を予測し、より高い確率を持つ目的地を高い評価値として算出し、この評価値をもとに目的地を選択し、その目的地での行動をシミュレート(シミュレーション中に得られた実際の所要時間(観測値)はエージェント個人の統計情報としてフィードバックされ更新)することにより、エージェントはシミュレーションの繰り返しにより経験を積むかのように知識を蓄積でき、個体差のある行動パターンを再現することが可能になり、最終的に個々のエージェントの行動が統合された群集全体の行動を精度の高い予測結果として出力するシミュレータが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7492840/15/ja
関連する専門分野の例:情報科学(複数のエージェントが自律的に行動する群集モデルの構築、各エージェントが個別の統計情報に基づいて意思決定を行うための確率的モデルの実装、シミュレーション結果の信頼性や予測精度を評価するための検証手法の確立)、統計学(シミュレーションで得られる観測値を基にエージェント個人の所要時間に関する確率分布を効率的に更新するアルゴリズムの設計、統計モデルの妥当性の評価、より精度の高い予測を可能にするためのモデル改善)
具体例として複数の時点における撮影対象の移動情報と周囲の障害物情報に基づき将来的な視界の遮蔽を予測して最適な移動先を決定する自律移動ロボットの移動先設定装置が挙げられます。
従来の技術では、現時点の障害物しか考慮しないため、移動開始直後に断続的な障害物によって撮影対象が見えなくなることがありました。
これに対して、カメラと移動手段を持つ自律移動ロボットの移動先を決定する装置であり、まず撮影対象の複数時点の位置情報を取得し、これを基に撮影対象の周囲に移動先の候補地点を複数設定し、次に候補地点と障害物の配置を記録した空間情報を参照し、各候補地点に移動した場合に撮影対象が障害物によって隠されてしまう可能性の高さを示す隠蔽度を方向ごとに算出し、隠蔽度を過去の複数時点にわたって統合し、さらに隣接する方向の隠蔽度を考慮して補正することで将来的にオクルージョンが発生しやすい方向を予測し、最終的に統合隠蔽度が一定の基準を下回る方向の候補地点の中からロボットから最も近い地点を最適な移動先として決定することにより、断続的な障害物による撮影の途切れや頻繁な方向転換による機体の不安定化を防ぎ、安定した追跡撮影を可能にする移動先設定装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7441608/15/ja
関連する専門分野の例:情報工学(移動先決定アルゴリズム(隠蔽度の算出、統合、評価値計算、経路探索)の設計、アルゴリズムがさまざまな環境(障害物の数や配置、撮影対象の移動パターン)でどれだけ効果的に機能するか検証するためのシミュレーション環境の構築)、機械工学(自律移動ロボット(特にドローン)の機体設計、追尾や経路追従といった移動制御を実現するためのローターの回転速度や操舵角を最適に制御するシステムの設計、移動中に衝突を避けるための障害物センサー(レーザー、超音波、カメラなど)の統合およびハードウェアとソフトウェアが連携して動的に回避行動をとるためのシステムの設計)
(2)綜合警備保障|開発トレンドと専門性
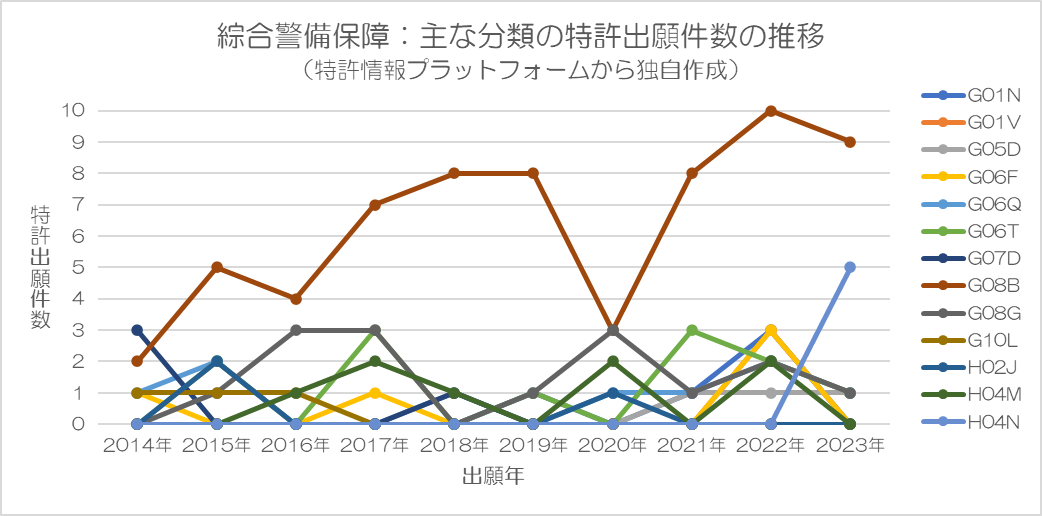
G08Bが最も多いです。次いでG08G、G06T、G06Q、H04Mが多いです。
具体例として災害発生地域で複数の移動体を連携させて残留者の避難誘導と未巡視区域の確認をおこなうための移動体制御システムが挙げられます。
従来の技術では、移動体が追跡対象を発見すると巡回を中断してしまい、他の残留者への対応が遅れるという問題がありました。
これに対して、カメラを搭載した複数の移動体を制御するシステムであり、まず災害管理装置から避難情報を取得し、これに基づき移動体(ドローンなど)の巡視経路を特定し、移動体が巡視中に人物を発見すると、その人物に避難誘導をおこなうための情報を通知し、巡視をおこなう移動体の飛行時間が所定の時間を超えると予測された場合、未巡視の経路を別の移動体に引き継がせるための情報を生成・通知することにより、1つの移動体が避難誘導をおこなっている間も、別の移動体が未巡視区域の確認を継続できるため災害地域にいるすべての残留者に対して効率的で迅速な対応が可能なシステムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7663422/15/ja
関連する専門分野の例:情報科学(複数の移動体が最も効率よく巡視できる巡視経路を特定するアルゴリズムの設計、移動体のカメラから送られてくる画像から高い精度で人物をリアルタイムに検出するための画像解析・AI技術(深層学習モデルなど)の構築、複数の移動体の位置情報、バッテリー残量、巡視状況を一元管理して巡視の引き継ぎ判断や指示を自動でおこなうシステムアーキテクチャの設計)、航空宇宙工学(災害地域特有の強風や悪天候下でも安定して飛行できるようなドローン機体の空力設計と軽量化・高強度化のための材料選定、避難誘導をおこなう際に人物を追跡しながら安全な距離を保ち巡視経路に沿って飛行するための自律飛行制御システムの設計、複数のドローンが互いに干渉することなく協調動作する無線通信システムの構築)
既存の見守りサービスは被監視者が無線タグを携帯し忘れて外出した場合、行動を監視できないという問題がありました。
これに対して、被監視者の居住空間に設置された無線タグ検知部と人検知部を組み合わせたタグ携帯監視装置であり、無線タグ検知部が無線タグの移動を検知せず、かつ人検知部が人の移動を検知した場合に被監視者が無線タグを携帯していないと判定し、案内部が音声などで無線タグの携帯を促す案内をおこない、さらに、この案内に応じて被監視者が応答部から応答信号を送ると一定期間は案内を停止する機能を備えていることにより、誤検知による継続的な注意喚起を防ぎつつ被監視者に対しタグ携帯を促し、不携帯のまま外出する状況を低減するタグ携帯監視装置が開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7495243/15/ja
関連する専門分野の例:情報科学(複数のセンサーデータを統合して被監視者の行動を正確に認識するアルゴリズムの設計、複数のセンサーデータをリアルタイムで処理して遅延なく案内や通知をおこなうシステムの構築、誤検知を防ぎ、応答部からのフィードバックをシステムに反映させるための状態遷移モデルや制御ロジックの設計)、通信工学(無線タグの電池寿命を最大化するための通信プロトコル最適化、複数の無線タグ検知部からの受信信号強度や指向性アンテナのスキャン結果から被監視者の位置を特定する技術の検討)
複数の通報者が同一事象を通報した場合、人が重複の判断をする必要があり、対処員の迅速な派遣を妨げるうえ、対処員が過剰に割り当てられる問題がありました。
これに対して、所定の事象の発生に伴う複数の通報を受け付ける受付部と、これらの通報が同一事象に起因するかを判定する判定部を備えた通報処理システムであり、判定部では通報の種別、位置、時間の少なくとも1つを用いて複数の通報を分析(具体的には、これらの要素から算定した複数の評価値を基に総合評価値を算出し、この値が閾値以上である場合に同一事象の通報であると判定)し、判定結果に基づき事象に対処する最適な対処員を特定する特定部が動作し、特定された対処員に対して通知部が対処通知をおこなうことにより、重複通報を自動的に統合して処理し、必要な数の対処員を効率良く迅速に派遣できるようにする通報処理システムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-6722711/15/ja
関連する専門分野の例:情報科学(通報の種別、位置、時間といった多岐にわたるデータの統合的分析、同一事象の通報を自動的に識別するアルゴリズムの設計、通報者の位置情報と通報時間から時空間的な近接性を評価する評価関数の設計、複数通報の件数から事象の重大度を推定するモデルの構築)、データサイエンス(通報の種別、位置、時間の各要素が同一事象の判定にどの程度寄与するかの評価、特定された対処員の到着時間や事象解決までの時間の分析および対処員の配置や特定基準を改善するための示唆の抽出)
具体例として工事区間における信号待ち車両の発進遅延を防止して通行を円滑化する交通誘導システムが挙げられます。
従来、信号待ちの運転者が何らかの理由で信号の変化を見逃すと、発車が遅れてしまい、後続車両の通行も妨げられてしまうという問題がありました。
これに対して、工事区間に設置された工事用信号機と、車両を検知する停車検知手段、これらを制御する管理装置から構成される交通誘導システムであり、まず停車検知手段が待機位置に停車中の車両を検知し、管理装置からの制御で工事用信号機の表示が通行権なし(赤信号)から通行権あり(緑信号)に切り替わり、その後、一定時間が経過しても停車検知手段が車両の発車を検知しない場合、報知手段が待機車両へ音声や光などで注意喚起を促することにより、運転者が信号の変化を見逃した場合でも自動的に発車を促すことができ交通の流れをスムーズにする交通誘導システムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7391520/15/ja
関連する専門分野の例:制御工学(停車検知センサーからのデータに基づいて信号機の表示切り替えタイミングを動的に調整するフィードバック制御システムの設計、通行権切り替えから報知までの猶予時間や報知音の大きさ・種類、報知の継続時間などを交通量や時間帯などの外部環境に応じて調整する適応制御アルゴリズムの設計、複数の工事用信号機やセンサーが連動する複雑な工事区間において車両の衝突リスクを最小化するため安全制御プロトコルの設計)、電子工学(車両の停車を正確に検知するためのレーザーセンサーや超音波センサーなどの最適な検知技術の選定および回路の設計、報知手段として用いるスピーカーやLEDライトを周囲の騒音や光環境に左右されずに効果的に機能するように出力レベルや指向性を調整する電子回路の設計)
具体例として監視カメラ等の画像から人物を検出する情報処理システムが挙げられます。
従来の技術では、画像内の物体が人以外の静物(マネキンなど)である場合に誤って人と検出してしまう問題がありました。
これに対して、撮像装置から複数の画像を取得する画像取得部、画像内の物体を検出する物体検出部、動き判定部と人検出判定部から構成される情報処理システムであり、まず物体検出部が人らしき物体を画像内から検出し、次に動き判定部が物体が検出された画像と他の複数の画像との類似度を計算し、その結果から物体の動きの有無を判定し、動きの大きい部位(腕部や脚部)には動きの少ない部位(頭部)よりも高い閾値設定により誤検出を低減し、最終的に人検出判定部は物体の検出信頼度が低い場合でも動きが確認できれば人と判定し、動きがなければ人ではないと判定することにより、静物との誤検出を防ぎ、人だけを正確に検出する情報処理システムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-7635482/15/ja
関連する専門分野の例:情報工学(監視カメラの画像から効率的かつ高精度に人物を検出するためのアルゴリズムの設計、物体検出部において学習済みモデルをさまざまな体勢や隠蔽状態の人物をより正確に検出できるように再学習・チューニング、誤検出を低減する動き判定の閾値を自動調整するロジックの設計)、コンピュータサイエンス(複数の画像フレームから動きを検出する処理において計算複雑度を分析して少ないリソースで高速に動作するデータ構造やアルゴリズムの設計、検出された物体が人物であるか否かを判定する際の確率論的なモデルの構築おぴょび誤検出率を数学的に最小化する方法の検討、物体検出モデルの信頼度スコアと動きの有無を統合的に判断するための推論システムの設計)
具体例としてイベント会場など特定の区間における人や車両などの移動体の移動時間を推定するシステムが挙げられます。
従来の技術では、来場者の全体人数は把握できるものの立ち止まりや移動の多様性といった移動体の特性を考慮した局所的な混雑状況の把握や移動時間の推定が困難でした。
これに対して、複数の移動体が持つ携帯端末から区間の始点と終点で通過時刻と移動時間の計測値を収集し、移動体の特性を考慮して計測データを選択(例えば、極端に速すぎるまたは遅すぎる計測値は除外)し、収集された計測値のばらつきを正規分布に近似し、平均から大きく外れた計測値ほど重みを小さくして移動平均を計算することにより、立ち止まりや寄り道といった不規則な挙動の影響を低減して実態に近い移動時間の推定値を算出する移動時間推定システムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-6700784/15/ja
関連する専門分野の例:情報工学(多数の端末から送信される無線信号データをリアルタイムで処理するためのアルゴリズムの設計、移動時間の計測値のばらつきを正規分布に近似する際の統計モデルのパラメータ(平均、分散)を機械学習を用いて動的に最適化する手法の検討)、統計学(歩行者の移動時間の計測値が正規分布に従うという仮定が適切であるかの検証、計測値のばらつき(分散)が時間帯やイベントの状況によってどのように変化するかの分析および動的な重み付けに用いるための統計モデルの構築)
具体例として通訳依頼者の発話内容を解析して緊急度に応じて通訳者を自動的に割り当てる通訳サービスシステムが挙げられます。
従来、大規模イベントなどで通訳依頼が集中すると、利用者は待機時間が長くなり、特に緊急事態においては通訳者の能力を迅速に活用できず適切な対応が困難でした。
これに対して、通訳依頼者からの呼接続要求に応答して通話を開始し、その通話中に発声された所定期間の音声を解析し、得られた文字データに含まれる特定のキーワードに基づいて通訳依頼の緊急度を自動で判定し、最も適した通訳者グループまたは個別の通訳者を選択(例えば、緊急度が高いと判定された場合には言語種別に関わらず複数の言語に対応可能な熟練通訳者グループを優先的に選択)し、最後に一時保留された依頼者との通話を選択された通訳者と接続することにより、緊急度の高い依頼を優先して処理し、人的リソースを効率的に活用する通訳サービスステムが開発されています(以下URL)。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-6689953/15/ja
関連する専門分野の例:情報科学(複数の通訳者端末や依頼者端末からの同時接続を処理するためのデータベース設計やサーバの負荷分散アルゴリズムの設計、キーワード辞書や通訳者の対応状況を示すデータを効率的に検索・更新できるようなデータ構造の設計)、通信工学(複数拠点に分散配置された通訳サーバと通訳者端末間で低遅延かつ高品質な通話を実現するための通信プロトコルの設計、通話が一時保留される際の呼接続処理や通訳者端末への接続切り替えをスムーズにおこなうための交換接続の設計)
(3)まとめ
警備や監視に関係する装置やシステムの出願が多く確認されます。
これらの出願に関わる開発がおこなわれていることが予想されます。
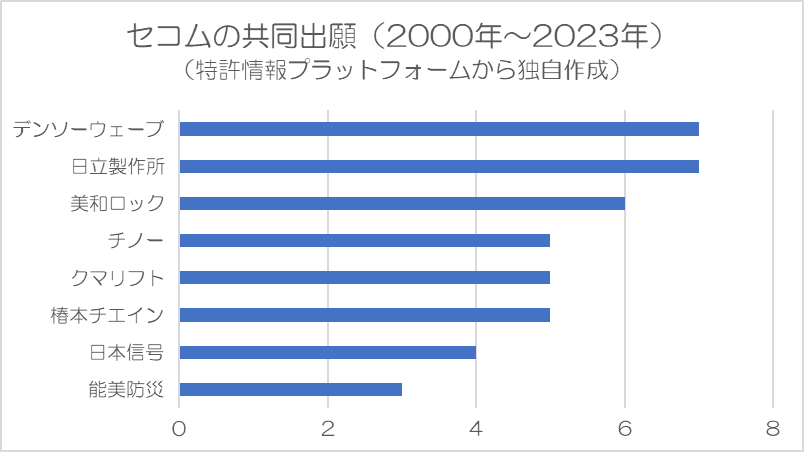
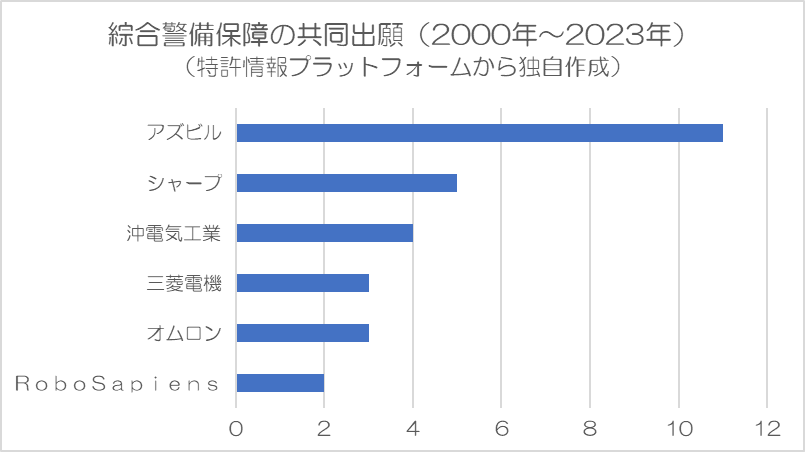
3.6 共同出願人との開発例
共同出願人からはビジネス的結びつきがわかります。
技術によっては、開発をアウトソーシングしている可能性もあります。
各社の共同出願人(筆頭出願人)は以下のとおりです。
(1)セコム
(2)綜合警備保障
詳細は省略します。
(3)上記(1)~(2)(共同出願人)のまとめ
共同出願の件数はいずれも多くはありません。
4 開発に求められる専門性
上記3で示した特許分類≒開発人材に求められる専門性、だと仮定します。
上記各特許情報には以下の人材が関わっていると言えます。
・情報系分野(情報科学、認知科学、データサイエンス、ソフトウェア工学、情報工学、通信工学、データサイエンス、コンピュータサイエンスなど)
顔認証の精度と安定性を向上させるための機械学習モデルの設計、訓練、人間の行動や意図の科学的分析およびシステムのユーザーインターフェース設計、警備モードの利用履歴データからユーザーの行動パターンや利用傾向を抽出してサービス改善に資する洞察を得るための分析モデルの構築、ユーザーに情報を提示するアプリケーションやシステムの機能設計、停電期間の長さに応じた警備モードの自動設定ロジックを設計などが求められます。
・数学系分野(応用数学、数理科学、統計学など)
複数のデータから抽出された特徴量を統合して対象物の形状を高精度に復元するための数学的モデルの構築・解析、移動遮蔽物の挙動を確率モデルとして定式化して複数の遮蔽物が同時に存在する場合の確率の数学的導出、統計的推論モデルに基づくエージェントの知識の更新と意思決定の仕組みの構築などが求められます。
・機械系分野(機械工学、航空宇宙工学など)
複数のカメラを配置したシステム全体の物理的な設計、カメラ間の位置関係を正確に把握するためのキャリブレーションの検討、3次元空間における幾何学的な関係のモデル化、制御体が物理的に安定して動作するためのハードウェアの設計、数の無人移動体(ドローン)が安定かつ安全に自律飛行できるような機体の設計や飛行制御などが求められます。
・電気系分野(電子工学、制御工学など)
複数のセンサーシステム(カメラ、LiDARなど)のハードウェア設計、センサーなどを連携させてリアルタイムでデータを処理するための回路および組み込みシステムの設計、交通誘導システムの各構成要素(信号機、センサー、管理装置)間の連携の最適化などが求められます。
・物理系分野(物理学など)
偏光板や光センサーの物理的特性の解析、光源と物体の関係性を正確にモデル化などが求められます。
ただし、上記特許出願にあたっては、共同出願者やその他事業者に技術をアウトソースしている可能性もあります。
5 まとめ
警備や監視に関係する装置やシステムの出願が多く確認されます。
大学の専攻と関連づけるとしたら、特に多いものとして、情報や数学などの研究が該当する可能性があります。
その他、機械、電気、物理も関係する可能性があります。
本記事の紹介情報は、サンプリングした特許情報に基づくものであり、企業の開発情報の一部に過ぎません。興味を持った企業がある場合は、その企業に絞ってより詳細を調べることをおすすめします。
参考記事:1社に絞って企業研究:特許検索して開発職を見つける方法4
以上、本記事が少しでも参考になれば幸いです。
<出典、参考>
・特許情報プラットフォーム(https://www.j-platpat.inpit.go.jp/)にて公開されている情報
・会社四季報 業界地図2024年、2025年版 東洋経済新報社
<留意事項>
本サイトでは、特許情報を正確かつ最新の状態でお伝えするよう努めていますが、情報の完全性を保証するものではありません。
特許情報のご活用や解釈は読者ご自身の責任でお願いいたします。
詳細な確認や重要な判断が必要な場合はお問い合わせフォームからご連絡ください。